
티스토리 뷰
2021. 10. 6. 16:20
안녕하세요
프로그래밍을 배우는 빛나는 샤트입니다.
SLAM 강의 21강. Probabilistic Approaches
*이 포스팅은 목원대학교 양정연 교수님의 SLAM강의 유튜브 영상을 보고 제작되었음을 밝힙니다.
출처: 21강. Probabilistic Approaches
21강. Probabilistic Approaches
🎉강의요약
1. SLAM을 대할 때는 세상을 확률적인 시각으로 볼 필요가 있다. 결정론적인 세계관을 붕괴시켜라
2. 예전에는 Localization, Mapping을 동시에 하지 못한다고 했지만 SLAM은 이를 동시에 한다.
3. 실제로 예시를 살펴보면 레이저 스캔을 통해 벽을 탐지할 때 아직 관측하지 못한 곳은 경계가 불명확하다.
4. 또한 경계를 그릴 때 확률적인 분포(타원 모양)를 이용해 경계를 특정한다.

<Mobile Robot. Introduction to Probailistic Methods. Lecture6>
<Probabilistic Approaches for SLAM. Why We use Probability?>
SLAM을 대할 때 확률적인 문제 정의 및 풀이가 필요하다.
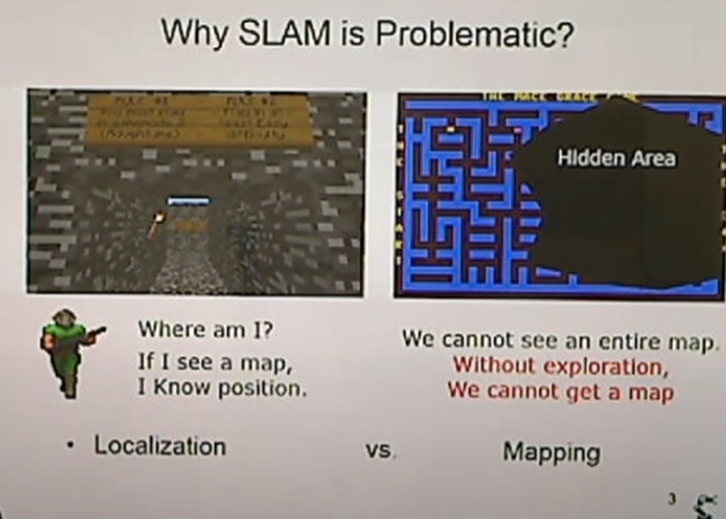
<Why SLAM is Problematic?>
값은 측정할 때마다 달라진다 -> threshold로 풀면 안 된다.
모든 자연계는 인과관계이므로 간단하게 표현할 수 없기 때문에 무차원화할 수 있는 확률 개념을 접목. -> 인과관계를 추적할 수 없다. 정밀하게 모델링할 수 없다.
세상은 결정론적인 세계관이 아니다.
'관측'에 대한 개념이 새로 나온다.
3body 문제: 너와 나의 관계는 관측할 수 있지만 3체의 경우 관측이 어렵다. 3체가 움직일 경우 더 어렵다.
[Localization]
나의 위치는 어디인가? 지도를 알고 있다면 위치를 알 수 있다.
[Mapping]
탐색하지 않은 곳은 알 수 없다. 지도가 없을때.
>> 위 기법이 동시에 일어난다.
이전까지는 맵이 있어야 [Localization]이 가능 그 이후에 [Mapping]이 가능

<Why SLAM is Problematic? Localization and Mapping occur coincidentally>
닭이 먼저냐 달걀이 먼저냐 처럼 동시에 할 수 없었던 문제를 동시에 처리 시작

<A robot must do What we did>
내가 잘 모르는 장소를 가게 되면 하는 것이 [Localization], [Mapping] 동시에 실행
불확실한 정보를 합치는 방법이 필요. >> SLAM 등장

<Everything in Probabilistic Robotics is NOT Sure(or Determinsitc>
위 그림은 실루엣을 기준으로 사람인지 아닌지 판단하는 것
> 관측을 통해서 무엇을 볼때는 불확실성을 항상 염두할 것


<SLAM Example>
V-SLAM을 하는 영상이며 영상을 확인해보면 타원형태로 윤곽이 그려지는 것을 알 수 있다. 이것은 타원 영역을 가지는 확률 분포이다. 즉 타원 모양 중 어떤 한 포인트에 장애물이 존재한다는 의미이다.

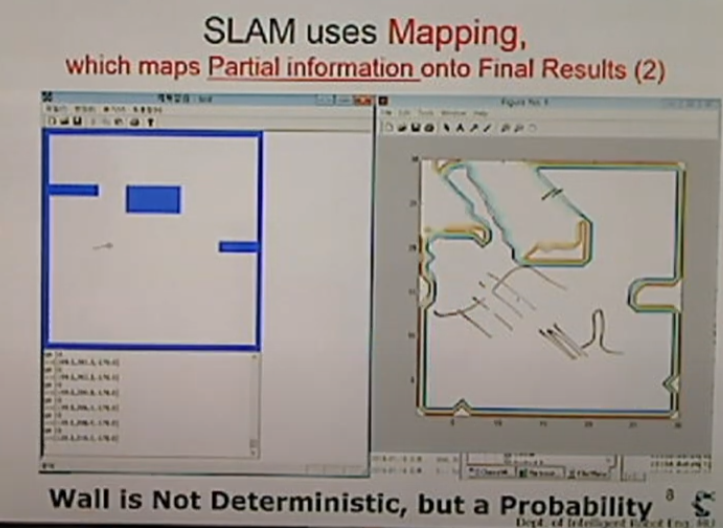
<SLAM uses Mapping>
관측이 잘 안 된 부분은 경계면이 뭉툭하다. 반면 관측이 잘 된 곳은 샤프하게 잘 그려지는 것을 알 수 있다.

<SLAM with Kalmann Filter or Particle Filter>
대부분 업체들은 Particle Filter, g-mapping 사용
ORB SLAM을 쓰는 업체는 많이 없다.
자체 SLAM을 개발한 국내 업체는 3곳뿐.
OpenSlam.org -> 오픈소스 사이트(참고)
피드백은 언제나 환영합니다.😊
틀린 부분 있다면 지적해주시고 도움이 되었다면 댓글과 공감 눌러주세요
'SLAM' 카테고리의 다른 글
| [SLAM] 양정연 교수 SLAM 강의 23강. Observation (0) | 2022.02.21 |
|---|---|
| [SLAM] 양정연 교수 SLAM 강의 22강. Non Parametric Method (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 20강. Bayesian Classifier (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 19강. Bayesian Probabilisty (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 18-2강. Normal Distribution in 2 Dim. Space (0) | 2022.02.21 |
- Total
- Today
- Yesterday
- 모두의연구소
- 자율주행로봇
- IT
- 모두의 연구소
- 인공지능 교육
- 멘탈관리
- 배달로봇
- 도전
- 서빙로봇
- 대전 인공지능
- 광주
- 실내자율주행
- 인공지능
- AIFFEL인공지능과정
- SLAM강의
- 해커톤
- AIFFEL후기
- 자율주행기술
- 인공지능교육
- Slam
- AIFFEL
- Python
- 광주AI
- 양정연SLAM
- 광주인공지능사관학교
- SLAM공부
- ros
- 아이펠
- 멋쟁이사자처럼
- AIFFEL교육
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |