
티스토리 뷰
2021. 10. 7. 23:52
안녕하세요
프로그래밍을 배우는 빛나는 샤트입니다.
SLAM 강의 24강. From math equation to State Equation
*이 포스팅은 목원대학교 양정연 교수님의 SLAM강의 유튜브 영상을 보고 제작되었음을 밝힙니다.
출처: 24강. From math equation to State Equation
24강. From math equation to State Equation
🎉강의요약
1. Kalman Filter 에러를 최소화
2. 2nd order mass-spring-damper 시스템 풀이
3. 미분 기호를 D로 치환해 풀이
4. 라플라스 변환과 아이겐벨류는 동일한 해를 표현
5. KF의 수식은 위의 방법들을 이용해 구할 수 있다.
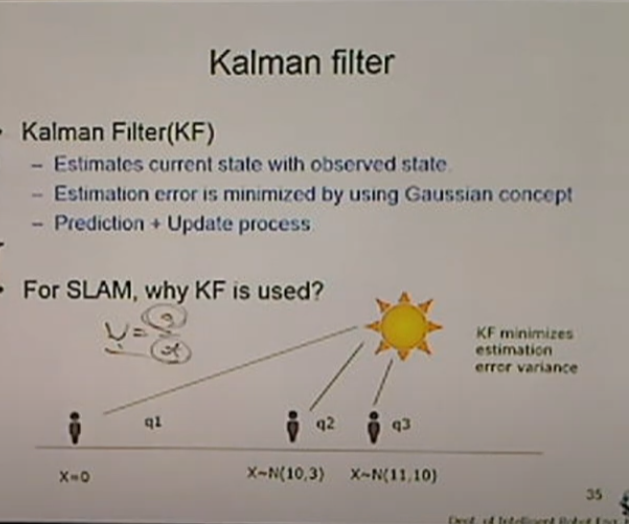
<Kalman Filter>
위 그림 설명
10발자국갔는데 불확실해서 분산=3
11발자국갔는데 더 불확실해서 분산=10
지도와 나침반가지고는 길 찾기 어렵다. 현재 위치를 모르기 때문.
해의 각도를 이용해 위치를 알 수 있다.
해의 각도(q)
거리 정보를 표현하기 위해서는 시간을 알아야한다.
> 시간을 알아야 현재 위치를 잘 알 수 있다.

<KF model>
칼만필터 수식은 9줄이 필요.
수식 이해는 처음부터는 어려움.
위 그래프의 초록색은 칼만 필터. 원본 데이트는 파랑색.
노이즈가 있어도 잘 나온다.
average filter을 써도 잘 안된다.

<Pre Knowledgd for KF.>
2nd order mass-spring-damper system.
> 2차 시스템. x를 2번 미분했으니 가속도. 움직이면 댐퍼나 스프링이 못 가게 움직인다. 파형은 흔들린다. F는 외력. 외력을 주게 되면 어떻게 움직이는지 보는 식
만약 F가 0이라면 호모지니어스 솔루션
F가 있다면 파티큘러 솔루션

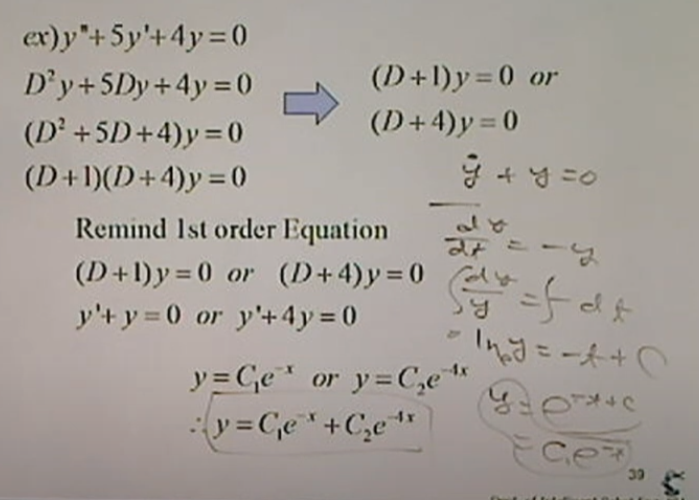
<Easier than 1st order>
미분 기호를 D로 치환해서 풀면 간단하게 풀린다.
예시의 답안은 맨 아래처럼 각자 구한 해를 더해서 표현한다.


<Mass-Spring System>
이 식을 풀게 되면 오일러 공식을 이용.
결과는 Sin 파형이 나오게 된다.

<Particular Solution is the Controller>
외력 F를 대신하는 것은 컨트롤러(P,I,D)
U=0은 호모지니어스. > System dynamics
y=x1, y미분=x2로 표현. x1,x2를 벡터화 > 상태 변수로 표현 가능
>> 상태 변수가 차지하는 공간을 상태 공간

<State Space Notation>
새로운 방정식을 구할 수 있다.
x는 상태 벡터.
차원2개인 문제로 바뀜.
> 상태 방정식을 구할 수 있다.

<State Space Notation with Control Input>
Ax^+Bu로 표현할 수 있다. 선형 제어
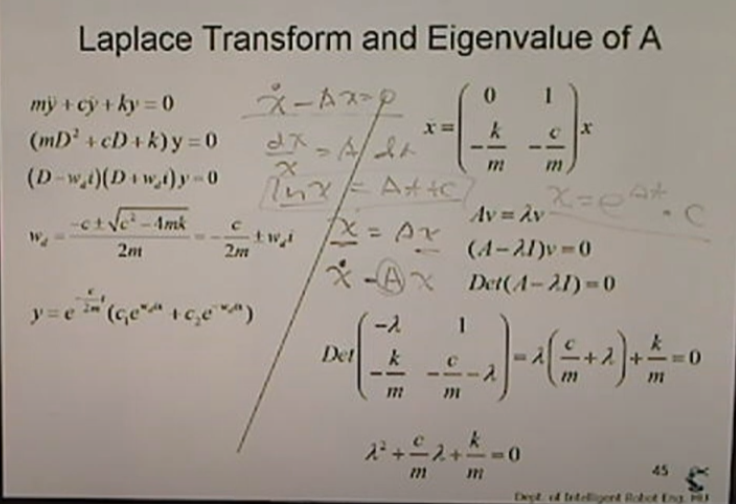
<Laplace Transform and Eigenvalue of A>
2개의 결과는 똑같다.
Eigenvalue를 사용해 A를 설명할 수 있다.
X^ - Ax = 0은 A가 양수라면 발산, 음수라면 수렴

<State Space model>
선형모델엔 미분을 수백번해도 x^안에 넣으면 무조건 1차식 형태로 바꿀 수 있다.
A의 Eigenvalue는 극점.
비선형모델은 함수가 들어가 있다.
일반적인 비선형모델에서는 제어하기 힘들다. x^=f(x,u)
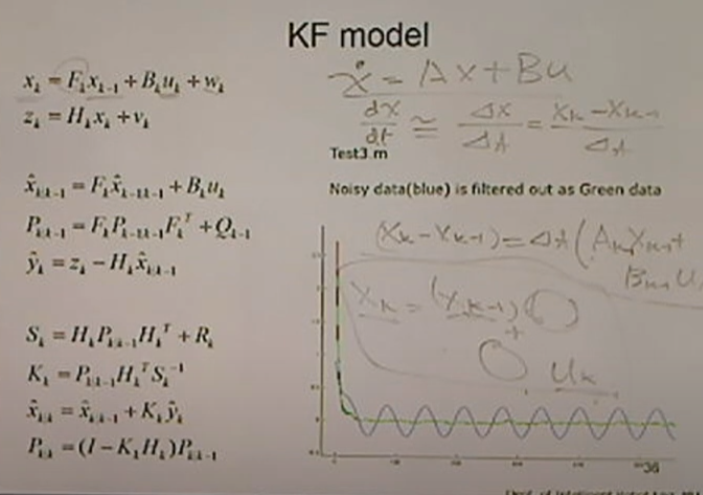
<KF model>
x^ = Ax + Bu의 식을 정리하면 슬라이드의 수식과 똑같다.
피드백은 언제나 환영합니다.😊
틀린 부분 있다면 지적해주시고 도움이 되었다면 댓글과 공감 눌러주세요
'SLAM' 카테고리의 다른 글
| [SLAM] 양정연 교수 SLAM 강의 26강. Introduction to Kalman Filter (0) | 2022.02.21 |
|---|---|
| [SLAM] 양정연 교수 SLAM 강의 25강. Why we need Observation? (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 23강. Observation (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 22강. Non Parametric Method (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 21강. Probabilistic Approaches (0) | 2022.02.21 |
- Total
- Today
- Yesterday
- 멋쟁이사자처럼
- 인공지능교육
- 아이펠
- Python
- 모두의연구소
- 자율주행로봇
- 인공지능
- 광주
- 광주인공지능사관학교
- 실내자율주행
- 멘탈관리
- AIFFEL인공지능과정
- 도전
- 대전 인공지능
- 인공지능 교육
- AIFFEL교육
- 광주AI
- 양정연SLAM
- SLAM공부
- ros
- SLAM강의
- 모두의 연구소
- AIFFEL
- Slam
- 해커톤
- 서빙로봇
- 배달로봇
- IT
- AIFFEL후기
- 자율주행기술
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |