
티스토리 뷰
2021. 10. 9. 14:29
안녕하세요
프로그래밍을 배우는 빛나는 샤트입니다.
SLAM 강의 28강. Kalman Gain in Kalman Filter
*이 포스팅은 목원대학교 양정연 교수님의 SLAM강의 유튜브 영상을 보고 제작되었음을 밝힙니다.
출처: 28강. Kalman Gain in Kalman Filter
28강. Kalman Gain in Kalman Filter
🎉강의요약
1. Covariance P를 최소화하는 것이 목표: 최소화되면 관측값과 실제값 비슷
2. 추정 - 예측 - Kalman Gain 반복: 이 과정을 통해 P를 최소화한다.

<4. Definition of Kalman Gain Measurement Updates Estimation>
P`은 Q때문에 점점 커진다.
x를 구하기 위해선 z(관측값)을 토대로 보정해서 구한다.
관측할 땐 noise가 있는 점을 조심해야 한다.
평균이 0이기때문에 예측에서 노이즈를 제거할 수 있다.
모델기반 -> 예측
zk는 센서를 통해 얻은 값.
관측한 값과 예측값 차이를 이용해 K gain를 해주면 x^(k+1)을 구할 수 있다.

<정리>
에러를 최소화하는 Cost Function을 구한다.
상태 추정은 hat
추정 에러 e
Covariance P
P의 최소를 구하게 되면 e1,e2가 독립. e**2->0
예측 X^(k+1)
Kalman Gain: K(z - z^) = x^ - x^`
>> x^ = x^` + K(z-Hx^`)
P가 작아지게 되면 x의 분포가 작아지게 되고 x가 정확해진다.

<4. Kalman Gain. How to minimize Estimation Error>
프라임(`)은 예측.
위 수식 유도 과정 참고

<5. P update, 5. Kalman Gain. 1 Dim example of Minimum Estimation Error>
e(state에 대한 에러), v(관측에 대한 에러) -> 독립
P가 최소화되는 K값을 구하기
> K로 P를 미분. 식을 정리해 K로 정리.

처음에 봤던 수식과 일치!

<Remind Kalman Filter>
X^`, P`
K -> X^구할 수 있다.
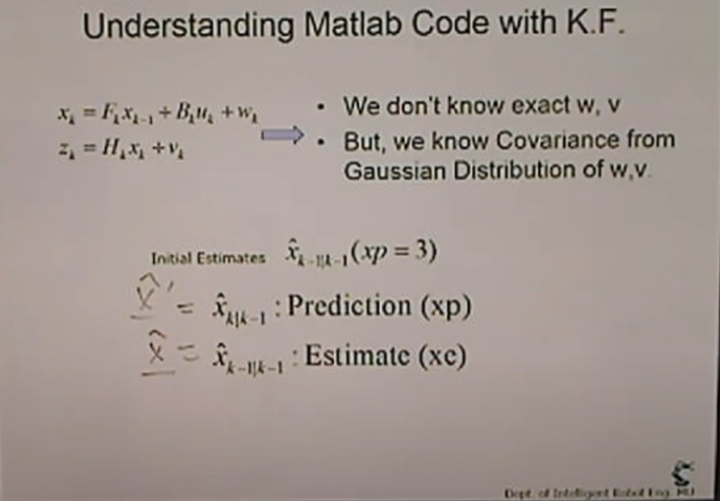
<Understanding Matlab Code with K.F.>
예측은 상태가 서로 다름. (xp)
추정은 상태가 같음. (xe)

<Understanding Matlab Code with K.F. 1. Prediction>
randn~N(0,1)
σN(0,1) = N(0,σ**2)
> w,v를 정의
X = X+0u + w를 이용해 system daynamics
xp = F*xe # 추정값으로부터 예측


<State vatiable cannot be Directly Measured We should estimate state variable by Prob.>
평균적으로 올라가 있다면 보정해서 0으로 맞춰서 사용해야한다.
안되면 Kalman Filter 사용할 수 없다.
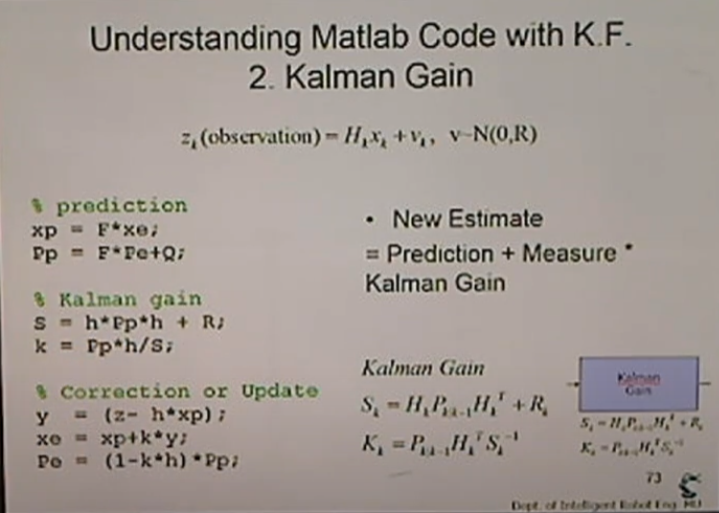
<Understanding Matlab Code with K.F. 2. Kalman Gain>
새로운 추정 = 예측 + 측정*칼만 게인
피드백은 언제나 환영합니다.😊
틀린 부분 있다면 지적해주시고 도움이 되었다면 댓글과 공감 눌러주세요
'SLAM' 카테고리의 다른 글
| [SLAM] 양정연 교수 SLAM 강의 30강. Can we think Kalman Filter with Probability? (0) | 2022.02.21 |
|---|---|
| [SLAM] 양정연 교수 SLAM 강의 29강. From Kalman Filter to Particle Filter (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 27강. Prediction in KF (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 26강. Introduction to Kalman Filter (0) | 2022.02.21 |
| [SLAM] 양정연 교수 SLAM 강의 25강. Why we need Observation? (0) | 2022.02.21 |
- Total
- Today
- Yesterday
- 자율주행로봇
- IT
- 광주인공지능사관학교
- 양정연SLAM
- 도전
- 모두의 연구소
- 실내자율주행
- SLAM공부
- 배달로봇
- ros
- 인공지능 교육
- 멘탈관리
- 멋쟁이사자처럼
- AIFFEL
- 모두의연구소
- 서빙로봇
- 아이펠
- AIFFEL인공지능과정
- 해커톤
- Slam
- 자율주행기술
- Python
- 인공지능교육
- 인공지능
- 광주
- SLAM강의
- AIFFEL교육
- 대전 인공지능
- AIFFEL후기
- 광주AI
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |